Research Projects
*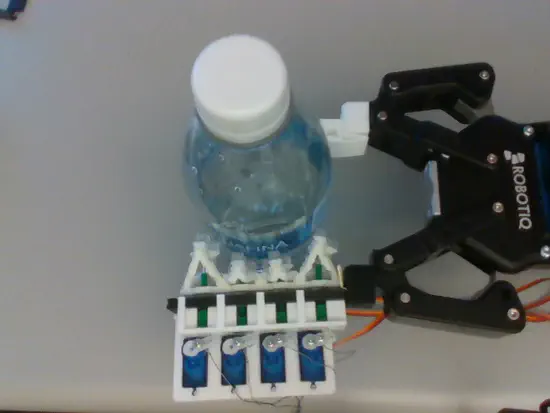

Variable Stiffness Robotic Finger
(2025-Present) Develpoment of a robotic finger capable of modifying the finger stiffness by using bistable mechanical structures
Virtual reality and psHRI
(2025-Present) Virtual reality is a powerful tool to achieve contextually-rich interactions while maintaining a low-cost environment for studying psHRI.
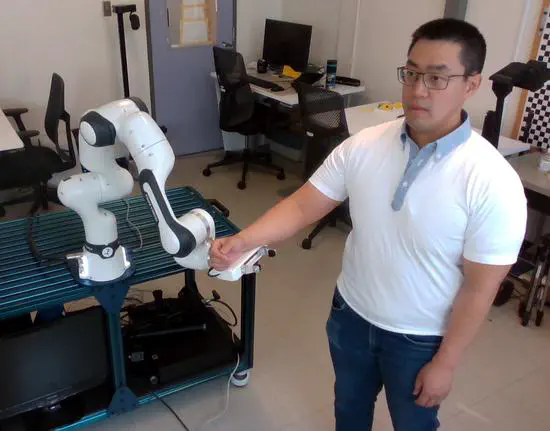
Robot-to-Human (R2H) Grasping
(2023-Present) How and where a robot grasps a human may elicit different emotional responses from the human. What are the key factors and how can robots deliberately exploit these emotional responses to achieve a desired reaction?
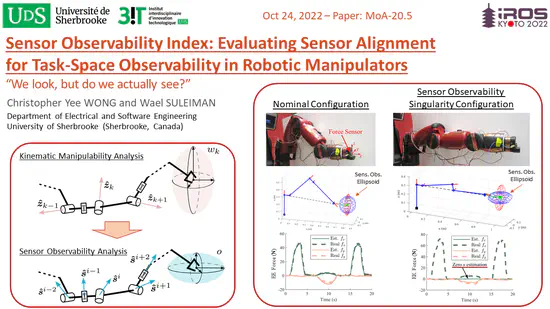
Sensor Observability Analysis
(2022-Present) Sensor Observability Analysis aims to quantify the quality of sensor observations of task-space quantities based on the robot configuration.